Faraday's law of induction (or simply Faraday's law) is a law of electromagnetism predicting how a magnetic field will interact with an electric circuit to produce an electromotive force (emf). This phenomenon, known as electromagnetic induction, is the fundamental operating principle of transformers, inductors, and many types of electric motors, generators and solenoids.[2][3]

The Maxwell–Faraday equation (listed as one of Maxwell's equations) describes the fact that a spatially varying (and also possibly time-varying, depending on how a magnetic field varies in time) electric field always accompanies a time-varying magnetic field, while Faraday's law states that there is emf (electromotive force, defined as electromagnetic work done on a unit charge when it has traveled one round of a conductive loop) on a conductive loop when the magnetic flux through the surface enclosed by the loop varies in time.
Faraday's law had been discovered and one aspect of it (transformer emf) was formulated as the Maxwell–Faraday equation later. The equation of Faraday's law can be derived by the Maxwell–Faraday equation (describing transformer emf) and the Lorentz force (describing motional emf). The integral form of the Maxwell–Faraday equation describes only the transformer emf, while the equation of Faraday's law describes both the transformer emf and the motional emf.
History edit
Electromagnetic induction was discovered independently by Michael Faraday in 1831 and Joseph Henry in 1832.[4] Faraday was the first to publish the results of his experiments.[5][6]

Faraday's notebook on August 29, 1831[8] describes an experimental demonstration of electromagnetic induction (see figure)[9] that wraps two wires around opposite sides of an iron ring (like a modern toroidal transformer). His assessment of newly-discovered properties of electromagnets suggested that when current started to flow in one wire, a sort of wave would travel through the ring and cause some electrical effect on the opposite side. Indeed, a galvanometer's needle measured a transient current (which he called a "wave of electricity") on the right side's wire when he connected or disconnected the left side's wire to a battery.[10]: 182–183 This induction was due to the change in magnetic flux that occurred when the battery was connected and disconnected.[7] His notebook entry also noted that fewer wraps for the battery side resulted in a greater disturbance of the galvanometer's needle.[8]
Within two months, Faraday had found several other manifestations of electromagnetic induction. For example, he saw transient currents when he quickly slid a bar magnet in and out of a coil of wires, and he generated a steady (DC) current by rotating a copper disk near the bar magnet with a sliding electrical lead ("Faraday's disk").[10]: 191–195

Michael Faraday explained electromagnetic induction using a concept he called lines of force. However, scientists at the time widely rejected his theoretical ideas, mainly because they were not formulated mathematically.[10]: 510 An exception was James Clerk Maxwell, who in 1861–62 used Faraday's ideas as the basis of his quantitative electromagnetic theory.[10]: 510 [11][12] In Maxwell's papers, the time-varying aspect of electromagnetic induction is expressed as a differential equation which Oliver Heaviside referred to as Faraday's law even though it is different from the original version of Faraday's law, and does not describe motional emf. Heaviside's version (see Maxwell–Faraday equation below) is the form recognized today in the group of equations known as Maxwell's equations.
Lenz's law, formulated by Emil Lenz in 1834,[13] describes "flux through the circuit", and gives the direction of the induced emf and current resulting from electromagnetic induction (elaborated upon in the examples below).
According to Albert Einstein, much of the groundwork and discovery of his special relativity theory was presented by this law of induction by Faraday in 1834.[14][15]
Faraday's law edit

The most widespread version of Faraday's law states:
The electromotive force around a closed path is equal to the negative of the time rate of change of the magnetic flux enclosed by the path.[16][17]
Mathematical statement edit

For a loop of wire in a magnetic field, the magnetic flux ΦB is defined for any surface Σ whose boundary is the given loop. Since the wire loop may be moving, we write Σ(t) for the surface. The magnetic flux is the surface integral:

When the flux changes—because B changes, or because the wire loop is moved or deformed, or both—Faraday's law of induction says that the wire loop acquires an emf, defined as the energy available from a unit charge that has traveled once around the wire loop.[18]: ch17 [19][20] (Although some sources state the definition differently, this expression was chosen for compatibility with the equations of special relativity.) Equivalently, it is the voltage that would be measured by cutting the wire to create an open circuit, and attaching a voltmeter to the leads.
Faraday's law states that the emf is also given by the rate of change of the magnetic flux:


The direction of the electromotive force is given by Lenz's law.
The laws of induction of electric currents in mathematical form was established by Franz Ernst Neumann in 1845.[21]
Faraday's law contains the information about the relationships between both the magnitudes and the directions of its variables. However, the relationships between the directions are not explicit; they are hidden in the mathematical formula.
.png)
It is possible to find out the direction of the electromotive force (emf) directly from Faraday’s law, without invoking Lenz's law. A left hand rule helps doing that, as follows:[22][23]
- Align the curved fingers of the left hand with the loop (yellow line).
- Stretch your thumb. The stretched thumb indicates the direction of n (brown), the normal to the area enclosed by the loop.
- Find the sign of ΔΦB, the change in flux. Determine the initial and final fluxes (whose difference is ΔΦB) with respect to the normal n, as indicated by the stretched thumb.
- If the change in flux, ΔΦB, is positive, the curved fingers show the direction of the electromotive force (yellow arrowheads).
- If ΔΦB is negative, the direction of the electromotive force is opposite to the direction of the curved fingers (opposite to the yellow arrowheads).
For a tightly wound coil of wire, composed of N identical turns, each with the same ΦB, Faraday's law of induction states that[24][25]

Maxwell–Faraday equation edit

The Maxwell–Faraday equation states that a time-varying magnetic field always accompanies a spatially varying (also possibly time-varying), non-conservative electric field, and vice versa. The Maxwell–Faraday equation is

(in SI units) where ∇ × is the curl operator and again E(r, t) is the electric field and B(r, t) is the magnetic field. These fields can generally be functions of position r and time t.[26]
The Maxwell–Faraday equation is one of the four Maxwell's equations, and therefore plays a fundamental role in the theory of classical electromagnetism. It can also be written in an integral form by the Kelvin–Stokes theorem,[27] thereby reproducing Faraday's law:

where, as indicated in the figure, Σ is a surface bounded by the closed contour ∂Σ, dl is an infinitesimal vector element of the contour ∂Σ, and dA is an infinitesimal vector element of surface Σ. Its direction is orthogonal to that surface patch, the magnitude is the area of an infinitesimal patch of surface.
Both dl and dA have a sign ambiguity; to get the correct sign, the right-hand rule is used, as explained in the article Kelvin–Stokes theorem. For a planar surface Σ, a positive path element dl of curve ∂Σ is defined by the right-hand rule as one that points with the fingers of the right hand when the thumb points in the direction of the normal n to the surface Σ.
The line integral around ∂Σ is called circulation.[18]: ch3 A nonzero circulation of E is different from the behavior of the electric field generated by static charges. A charge-generated E-field can be expressed as the gradient of a scalar field that is a solution to Poisson's equation, and has a zero path integral. See gradient theorem.
The integral equation is true for any path ∂Σ through space, and any surface Σ for which that path is a boundary.
If the surface Σ is not changing in time, the equation can be rewritten:

The electric vector field induced by a changing magnetic flux, the solenoidal component of the overall electric field, can be approximated in the non-relativistic limit by the volume integral equation[26]: 321

Proof edit
The four Maxwell's equations (including the Maxwell–Faraday equation), along with Lorentz force law, are a sufficient foundation to derive everything in classical electromagnetism.[18][19] Therefore, it is possible to "prove" Faraday's law starting with these equations.[28][29]
The starting point is the time-derivative of flux through an arbitrary surface Σ (that can be moved or deformed) in space:

(by definition). This total time derivative can be evaluated and simplified with the help of the Maxwell–Faraday equation and some vector identities; the details are in the box below:
| Consider the time-derivative of magnetic flux through a closed boundary (loop) that can move or be deformed. The area bounded by the loop is denoted as Σ(t)), then the time-derivative can be expressed as
The integral can change over time for two reasons: The integrand can change, or the integration region can change. These add linearly, therefore: Next, we analyze the second term on the right-hand side:  Here, identities of triple scalar products are used. Therefore, Putting these together results in, |







The result is:

In the case of a conductive loop, emf (Electromotive Force) is the electromagnetic work done on a unit charge when it has traveled around the loop once, and this work is done by the Lorentz force. Therefore, emf is expressed as

In a macroscopic view, for charges on a segment of the loop, v consists of two components in average; one is the velocity of the charge along the segment vt, and the other is the velocity of the segment vl (the loop is deformed or moved). vt does not contribute to the work done on the charge since the direction of vt is same to the direction of . Mathematically,








Exceptions edit
It is tempting to generalize Faraday's law to state: If ∂Σ is any arbitrary closed loop in space whatsoever, then the total time derivative of magnetic flux through Σ equals the emf around ∂Σ. This statement, however, is not always true and the reason is not just from the obvious reason that emf is undefined in empty space when no conductor is present. As noted in the previous section, Faraday's law is not guaranteed to work unless the velocity of the abstract curve ∂Σ matches the actual velocity of the material conducting the electricity.[31] The two examples illustrated below show that one often obtains incorrect results when the motion of ∂Σ is divorced from the motion of the material.[18]
-
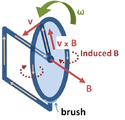 Faraday's homopolar generator. The disc rotates with angular rate ω, sweeping the conducting radius circularly in the static magnetic field B (which direction is along the disk surface normal). The magnetic Lorentz force v × B drives a current along the conducting radius to the conducting rim, and from there the circuit completes through the lower brush and the axle supporting the disc. This device generates an emf and a current, although the shape of the "circuit" is constant and thus the flux through the circuit does not change with time.
Faraday's homopolar generator. The disc rotates with angular rate ω, sweeping the conducting radius circularly in the static magnetic field B (which direction is along the disk surface normal). The magnetic Lorentz force v × B drives a current along the conducting radius to the conducting rim, and from there the circuit completes through the lower brush and the axle supporting the disc. This device generates an emf and a current, although the shape of the "circuit" is constant and thus the flux through the circuit does not change with time. -
 A wire (solid red lines) connects to two touching metal plates (silver) to form a circuit. The whole system sits in a uniform magnetic field, normal to the page. If the abstract path ∂Σ follows the primary path of current flow (marked in red), then the magnetic flux through this path changes dramatically as the plates are rotated, yet the emf is almost zero. After Feynman Lectures on Physics[18]: ch17
A wire (solid red lines) connects to two touching metal plates (silver) to form a circuit. The whole system sits in a uniform magnetic field, normal to the page. If the abstract path ∂Σ follows the primary path of current flow (marked in red), then the magnetic flux through this path changes dramatically as the plates are rotated, yet the emf is almost zero. After Feynman Lectures on Physics[18]: ch17


One can analyze examples like these by taking care that the path ∂Σ moves with the same velocity as the material.[31] Alternatively, one can always correctly calculate the emf by combining Lorentz force law with the Maxwell–Faraday equation:[18]: ch17 [32]

where "it is very important to notice that (1) [vm] is the velocity of the conductor ... not the velocity of the path element dl and (2) in general, the partial derivative with respect to time cannot be moved outside the integral since the area is a function of time."[32]
Faraday's law and relativity edit
Two phenomena edit
Faraday's law is a single equation describing two different phenomena: the motional emf generated by a magnetic force on a moving wire (see the Lorentz force), and the transformer emf generated by an electric force due to a changing magnetic field (described by the Maxwell–Faraday equation).
James Clerk Maxwell drew attention to this fact in his 1861 paper On Physical Lines of Force.[33] In the latter half of Part II of that paper, Maxwell gives a separate physical explanation for each of the two phenomena.
A reference to these two aspects of electromagnetic induction is made in some modern textbooks.[34] As Richard Feynman states:
So the "flux rule" that the emf in a circuit is equal to the rate of change of the magnetic flux through the circuit applies whether the flux changes because the field changes or because the circuit moves (or both) ...
Yet in our explanation of the rule we have used two completely distinct laws for the two cases – v × B for "circuit moves" and ∇ × E = −∂tB for "field changes".
We know of no other place in physics where such a simple and accurate general principle requires for its real understanding an analysis in terms of two different phenomena.
— Richard P. Feynman, The Feynman Lectures on Physics[35]
[dubious ]
Explanation based on four-dimensional formalism edit
In the general case, explanation of the motional emf appearance by action of the magnetic force on the charges in the moving wire or in the circuit changing its area is unsatisfactory. As a matter of fact, the charges in the wire or in the circuit could be completely absent, will then the electromagnetic induction effect disappear in this case? This situation is analyzed in the article, in which, when writing the integral equations of the electromagnetic field in a four-dimensional covariant form, in the Faraday’s law the total time derivative of the magnetic flux through the circuit appears instead of the partial time derivative. [36] Thus, electromagnetic induction appears either when the magnetic field changes over time or when the area of the circuit changes. From the physical point of view, it is better to speak not about the induction emf, but about the induced electric field strength , that occurs in the circuit when the magnetic flux changes. In this case, the contribution to from the change in the magnetic field is made through the term , where is the vector potential. If the circuit area is changing in case of the constant magnetic field, then some part of the circuit is inevitably moving, and the electric field emerges in this part of the circuit in the comoving reference frame K’ as a result of the Lorentz transformation of the magnetic field , present in the stationary reference frame K, which passes through the circuit. The presence of the field in K’ is considered as a result of the induction effect in the moving circuit, regardless of whether the charges are present in the circuit or not. In the conducting circuit, the field causes motion of the charges. In the reference frame K, it looks like appearance of emf of the induction , the gradient of which in the form of , taken along the circuit, seems to generate the field .






Einstein's view edit
Reflection on this apparent dichotomy was one of the principal paths that led Albert Einstein to develop special relativity:
It is known that Maxwell's electrodynamics—as usually understood at the present time—when applied to moving bodies, leads to asymmetries which do not appear to be inherent in the phenomena. Take, for example, the reciprocal electrodynamic action of a magnet and a conductor.
The observable phenomenon here depends only on the relative motion of the conductor and the magnet, whereas the customary view draws a sharp distinction between the two cases in which either the one or the other of these bodies is in motion. For if the magnet is in motion and the conductor at rest, there arises in the neighbourhood of the magnet an electric field with a certain definite energy, producing a current at the places where parts of the conductor are situated.
But if the magnet is stationary and the conductor in motion, no electric field arises in the neighbourhood of the magnet. In the conductor, however, we find an electromotive force, to which in itself there is no corresponding energy, but which gives rise—assuming equality of relative motion in the two cases discussed—to electric currents of the same path and intensity as those produced by the electric forces in the former case.
Examples of this sort, together with unsuccessful attempts to discover any motion of the earth relative to the "light medium," suggest that the phenomena of electrodynamics as well as of mechanics possess no properties corresponding to the idea of absolute rest.
See also edit
References edit
- ^ Poyser, Arthur William (1892). Magnetism and Electricity: A manual for students in advanced classes. London and New York: Longmans, Green, & Co. Fig. 248, p. 245. Retrieved 2009-08-06.
- ^ Sadiku, M. N. O. (2007). Elements of Electromagnetics (4th ed.). New York & Oxford: Oxford University Press. p. 386. ISBN 978-0-19-530048-2.
- ^ "Applications of electromagnetic induction". Boston University. 1999-07-22.
- ^ "A Brief History of Electromagnetism" (PDF).
- ^ Ulaby, Fawwaz (2007). Fundamentals of applied electromagnetics (5th ed.). Pearson:Prentice Hall. p. 255. ISBN 978-0-13-241326-8.
- ^ "Joseph Henry". Member Directory, National Academy of Sciences. Retrieved 2016-12-30.
- ^ a b Giancoli, Douglas C. (1998). Physics: Principles with Applications (5th ed.). pp. 623–624.
- ^ a b Faraday, Michael (1831-08-29). "Faraday's notebooks: Electromagnetic Induction" (PDF). The Royal Institution of Great Britain. Archived from the original (PDF) on 2021-08-30.
- ^ Faraday, Michael; Day, P. (1999-02-01). The philosopher's tree: a selection of Michael Faraday's writings. CRC Press. p. 71. ISBN 978-0-7503-0570-9. Retrieved 28 August 2011.
- ^ a b c d Williams, L. Pearce (1965). Michael Faraday. New York, Basic Books.[full citation needed]
- ^ Clerk Maxwell, James (1904). A Treatise on Electricity and Magnetism. Vol. 2 (3rd ed.). Oxford University Press. pp. 178–179, 189.
- ^ "Archives Biographies: Michael Faraday". The Institution of Engineering and Technology.
- ^ Lenz, Emil (1834). "Ueber die Bestimmung der Richtung der durch elektodynamische Vertheilung erregten galvanischen Ströme". Annalen der Physik und Chemie. 107 (31): 483–494. Bibcode:1834AnP...107..483L. doi:10.1002/andp.18341073103.
A partial translation of the paper is available in Magie, W. M. (1963). A Source Book in Physics. Cambridge, MA: Harvard Press. pp. 511–513. - ^ Siegel, Ethan (1 March 2019). "Relativity Wasn't Einstein's Miracle; It Was Waiting In Plain Sight For 71 Years". Forbes. Archived from the original on 3 July 2023. Retrieved 3 July 2023.
- ^ Siegel, Ethan (28 June 2023). "71 years earlier, this scientist beat Einstein to relativity - Michael Faraday's 1834 law of induction was the key experiment behind the eventual discovery of relativity. Einstein admitted it himself". Big Think. Archived from the original on 28 June 2023. Retrieved 3 July 2023.
- ^ Jordan, Edward; Balmain, Keith G. (1968). Electromagnetic Waves and Radiating Systems (2nd ed.). Prentice-Hall. p. 100.
Faraday's Law, which states that the electromotive force around a closed path is equal to the negative of the time rate of change of magnetic flux enclosed by the path.
- ^ Hayt, William (1989). Engineering Electromagnetics (5th ed.). McGraw-Hill. p. 312. ISBN 0-07-027406-1.
The magnetic flux is that flux which passes through any and every surface whose perimeter is the closed path.
- ^ a b c d e f Feynman, Richard P. "The Feynman Lectures on Physics Vol. II". feynmanlectures.caltech.edu. Retrieved 2020-11-07.
- ^ a b Griffiths, David J. (1999). Introduction to Electrodynamics (3rd ed.). Upper Saddle River, NJ: Prentice Hall. pp. 301–303. ISBN 0-13-805326-X.
- ^ Tipler; Mosca (2004). Physics for Scientists and Engineers. Macmillan. p. 795. ISBN 9780716708100.
- ^ Neumann, Franz Ernst (1846). "Allgemeine Gesetze der inducirten elektrischen Ströme" (PDF). Annalen der Physik. 143 (1): 31–44. Bibcode:1846AnP...143...31N. doi:10.1002/andp.18461430103. Archived from the original (PDF) on 12 March 2020.
- ^ a b Yehuda Salu (2014). "A Left Hand Rule for Faraday's Law". The Physics Teacher. 52 (1): 48. Bibcode:2014PhTea..52...48S. doi:10.1119/1.4849156. Video Explanation
- ^ Salu, Yehuda. "Bypassing Lenz's Rule - A Left Hand Rule for Faraday's Law". www.PhysicsForArchitects.com. Archived from the original on 7 May 2020. Retrieved 30 July 2017.
- ^ Whelan, P. M.; Hodgeson, M. J. (1978). Essential Principles of Physics (2nd ed.). John Murray. ISBN 0-7195-3382-1.
- ^ Nave, Carl R. "Faraday's Law". HyperPhysics. Georgia State University. Retrieved 2011-08-29.
- ^ a b Griffiths, David J. (2017). Introduction to Electrodynamics. 4 (Fourth ed.). Cambridge University Press. ISBN 978-1-108-42041-9. OCLC 965197645.
- ^ Harrington, Roger F. (2003). Introduction to electromagnetic engineering. Mineola, NY: Dover Publications. p. 56. ISBN 0-486-43241-6.
- ^ a b Davison, M. E. (1973). "A Simple Proof that the Lorentz Force, Law Implied Faraday's Law of Induction, when B is Time Independent". American Journal of Physics. 41 (5): 713. Bibcode:1973AmJPh..41..713D. doi:10.1119/1.1987339.
- ^ a b Krey; Owen (14 August 2007). Basic Theoretical Physics: A Concise Overview. Springer. p. 155. ISBN 9783540368052.
- ^ Simonyi, K. (1973). Theoretische Elektrotechnik (5th ed.). Berlin: VEB Deutscher Verlag der Wissenschaften. eq. 20, p. 47.
- ^ a b Stewart, Joseph V. Intermediate Electromagnetic Theory. p. 396.
This example of Faraday's Law [the homopolar generator] makes it very clear that in the case of extended bodies care must be taken that the boundary used to determine the flux must not be stationary but must be moving with respect to the body.
- ^ a b Hughes, W. F.; Young, F. J. (1965). The Electromagnetodynamics of Fluid. John Wiley. Eq. (2.6–13) p. 53.
- ^ Clerk Maxwell, James (1861). "On physical lines of force". Philosophical Magazine. 90. Taylor & Francis: 11–23. doi:10.1080/14786431003659180. S2CID 135524562.
- ^ Griffiths, David J. (1999). Introduction to Electrodynamics (3rd ed.). Upper Saddle River, NJ: Prentice Hall. pp. 301–3. ISBN 0-13-805326-X.
Note that the law relating flux to emf, which this article calls "Faraday's law", is referred to in Griffiths' terminology as the "universal flux rule". Griffiths uses the term "Faraday's law" to refer to what this article calls the "Maxwell–Faraday equation". So in fact, in the textbook, Griffiths' statement is about the "universal flux rule". - ^ The Feynman Lectures on Physics Vol. II Ch. 17: The Laws of Induction
- ^ Fedosin, Sergey G. (2019). "On the Covariant Representation of Integral Equations of the Electromagnetic Field". Progress in Electromagnetics Research C. 96: 109–122. arXiv:1911.11138. Bibcode:2019arXiv191111138F. doi:10.2528/PIERC19062902. S2CID 208095922.
- ^ Einstein, Albert. "On the Electrodynamics of Moving Bodies" (PDF).
Further reading edit
- Clerk Maxwell, James (1881). A treatise on electricity and magnetism, Vol. II. Oxford: Clarendon Press. ch. III, sec. 530, p. 178. ISBN 0-486-60637-6.
a treatise on electricity and magnetism.
External links edit
 Media related to Faraday's law of induction at Wikimedia Commons
Media related to Faraday's law of induction at Wikimedia Commons- A simple interactive tutorial on electromagnetic induction (click and drag magnet back and forth) National High Magnetic Field Laboratory
- Roberto Vega. Induction: Faraday's law and Lenz's law – Highly animated lecture, with sound effects, Electricity and Magnetism course page
- Notes from Physics and Astronomy HyperPhysics at Georgia State University
- Tankersley and Mosca: Introducing Faraday's law
- A free simulation on motional emf